Vorseparierung des Schüttguts: Grobtrennung von Stahl und großen Teilen vor Eintritt in die Roboterzelle
Einsatz eines Visionsystems zur präzisen Erkennung der Knopfbatterien im feinen Bruchmaterial
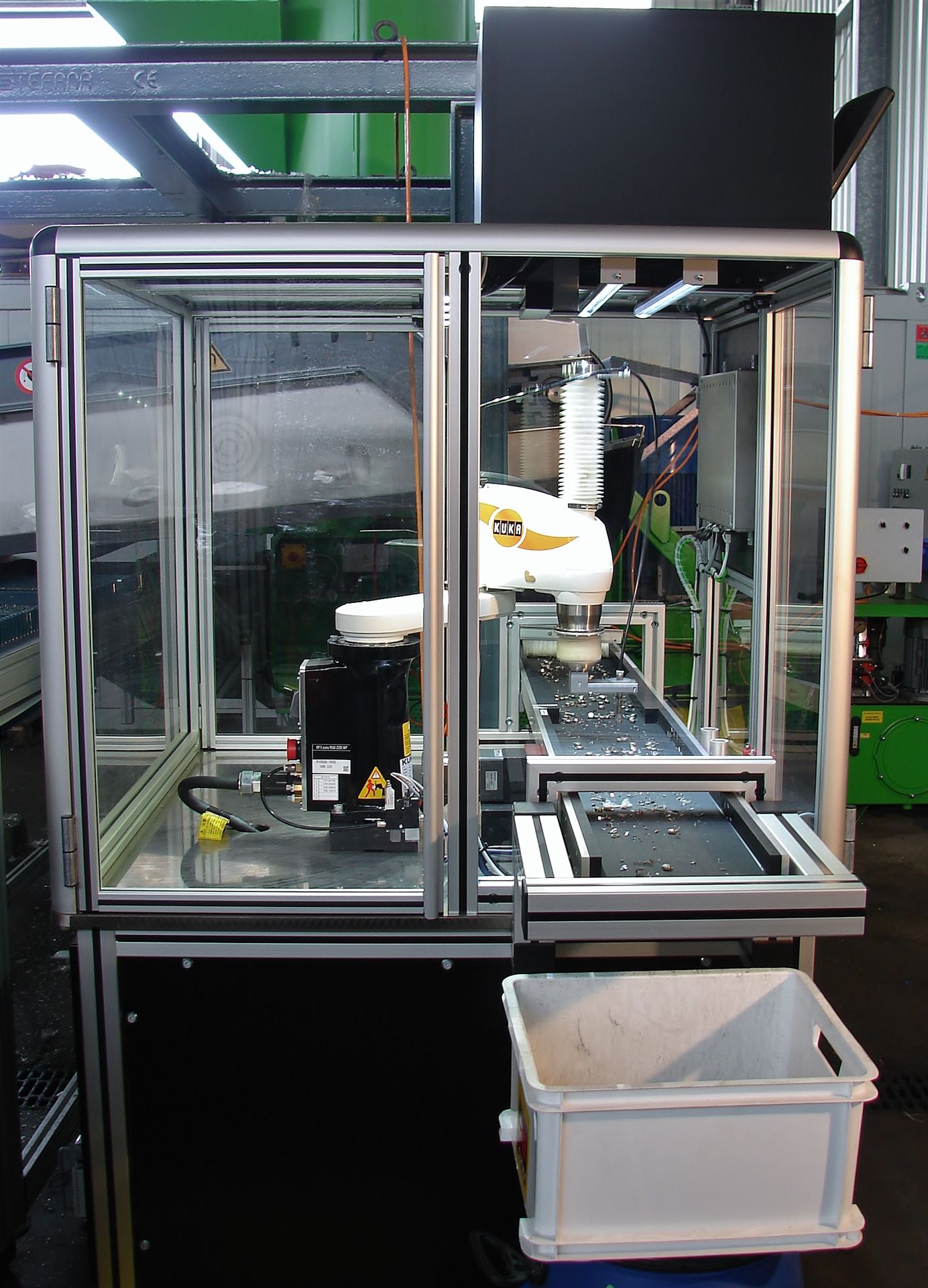
Integration eines Scara-Roboters, der gezielt die Batterien greift und in einen geschlossenen Behälter überführt
Restmaterial wird über ein Transportband in einen separaten Behälter ausgeschleust
Auslegung der gesamten Anlage für zuverlässigen Betrieb in wechselnden Umgebungstemperaturen


